
Τόπος καταγωγής:
Κίνα
Μάρκα:
YOUNGYOU
Πιστοποίηση:
CE
Αριθμό μοντέλου:
PY4030U-050
Επαφή ΗΠΑ
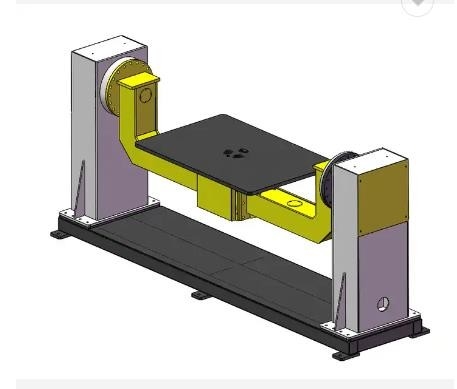




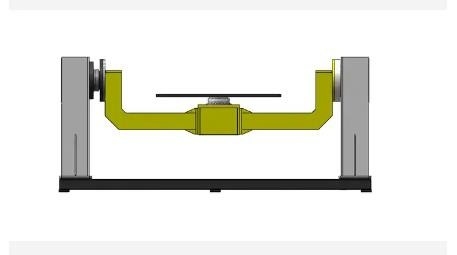
Γίνοντας διαξωνικό positioner συγκόλλησης φορτίων 100-1000kg άξονα 50-60hz περιστροφικών πλακών 380v της Κίνας 1200*1200
Ελαφριές ναυσιπλοΐα αντανάκλασης και τεχνολογία προσδιορισμού θέσης για τα κινητά ρομπότ
Η χαρακτηριστική ελαφριά μέθοδος προσδιορισμού θέσης ναυσιπλοΐας αντανάκλασης χρησιμοποιεί κυρίως το λέιζερ ή τους υπέρυθρους αισθητήρες για την έκταση. Το λέιζερ και οι υπέρυθρες ακτίνες και χρησιμοποιούν την ελαφριά τεχνολογία αντανάκλασης για τη ναυσιπλοΐα και τον προσδιορισμό θέσης.
Το σύστημα παγκόσμιας πλοήγησης λέιζερ αποτελείται γενικά από έναν περιστρεφόμενο μηχανισμό λέιζερ, έναν ανακλαστήρα, μια οπτικοηλεκτρονική λαμβάνουσα συσκευή, και μια συσκευή αποκτήσεων και μετάδοσης στοιχείων.
Κατά τη λειτουργία, το λέιζερ εκπέμπεται εξωτερικά μέσω ενός μηχανισμού περιστρεφόμενων καθρεφτών. Κατά ενός συνεταιριστικού ορόσημου που αποτελείται ανίχνευση από έναν οπίσθιο ανακλαστήρα, απεικονισμένο τη φως υποβάλλεται σε επεξεργασία από έναν φωτοηλεκτρικό δέκτη ως σήμα ανίχνευσης. Το πρόγραμμα αποκτήσεων στοιχείων αρχίζει για να διαβάζει τα στοιχεία δίσκων κώδικα του περιστρεφόμενου μηχανισμού (η μετρημένη αξία γωνίας του στόχου), και διαβιβάζεται έπειτα στον ανώτερο υπολογιστή για τα στοιχεία - επεξεργασία μέσω της επικοινωνίας. Με βάση τη γνωστή θέση του ορόσημου και των ανιχνευμένων πληροφοριών, η τρέχουσα θέση και η κατεύθυνση του αισθητήρα στο ισότιμο σύστημα ορόσημων μπορούν να υπολογιστούν για να επιτύχουν την περαιτέρω ναυσιπλοΐα και τον προσδιορισμό θέσης.
Το λέιζερ που κυμαίνεται έχει τα πλεονεκτήματα της στενής ακτίνας, του καλού παραλληλισμού, της μικρής διασποράς, και της υψηλής ανάλυσης στην κυμαινόμενη κατεύθυνση, αλλά επίσης πολύ επηρεάζεται από τους περιβαλλοντικούς παράγοντες. Επομένως, πώς το συλλεχθε'ν σήμα όταν η χρησιμοποίηση του λέιζερ που κυμαίνεται είναι επίσης μια σημαντική πρόκληση. Επιπλέον, το λέιζερ που κυμαίνεται επίσης έχει τα τυφλά σημεία, καθιστώντας το δύσκολο να επιτύχει τη ναυσιπλοΐα και τοποθετώντας απλώς από το λέιζερ. Στις βιομηχανικές εφαρμογές, γενικά, ακόμα ευρέως χρησιμοποιείται στη βιομηχανική επιτόπια δοκιμή μέσα σε μια συγκεκριμένη σειρά, όπως η ανίχνευση των ρωγμών σωληνώσεων.
Η υπέρυθρη τεχνολογία αντίληψης χρησιμοποιείται συχνά στα πολυ κοινά συστήματα αποφυγής εμποδίων ρομπότ για να διαμορφώσει μια μεγάλη περιοχή του ρομπότ «ευαίσθητο δέρμα» που καλύπτει την επιφάνεια του βραχίονα ρομπότ και μπορεί να ανιχνεύσει τα διάφορα αντικείμενα που αντιμετωπίζονται από το βραχίονα ρομπότ κατά τη λειτουργία.
Ένας χαρακτηριστικός υπέρυθρος αισθητήρας περιλαμβάνει μια στερεάς κατάστασης εκπέμπουσα φως δίοδο που μπορεί να εκπέμψει το υπέρυθρο φως και μια στερεάς κατάστασης φωτοευαίσθητη δίοδο που χρησιμεύει ως ένας δέκτης. Το διαμορφωμένο σήμα εκπέμπεται από ένα υπέρυθρο φως που εκπέμπει το σωλήνα, και ο υπέρυθρος φωτοευαίσθητος σωλήνας λαμβάνει το υπέρυθρο διαμορφωμένο σήμα που απεικονίζεται από το στόχο. Η αποβολή της περιβαλλοντικής υπέρυθρης παρέμβασης εξασφαλίζεται από τη διαμόρφωση σημάτων και ένα αφιερωμένο υπέρυθρο φίλτρο. Εάν το σήμα παραγωγής Vo αντιπροσωπεύει την παραγωγή τάσης της απεικονισμένης ελαφριάς έντασης, κατόπιν Vo είναι μια λειτουργία της απόστασης μεταξύ του ελέγχου και του κομματιού προς κατεργασία: Vo=f (Χ, π), όπου το π είναι ο συντελεστής αντανάκλασης του κομματιού προς κατεργασία. Το Π συσχετίζεται με το χρώμα επιφάνειας και την τραχύτητα του αντικειμένου στόχων. Χ - απόσταση μεταξύ του ελέγχου και του κομματιού προς κατεργασία.
Όταν το κομμάτι προς κατεργασία είναι ένας στόχος του ίδιου τύπου με την ίδια π-αξία, το Χ και Vo αντιστοιχούν ένα προς ένα. Χ μπορεί να ληφθεί με την παρεμβολή των πειραματικών στοιχείων των μετρήσεων εγγύτητας των διάφορων αντικειμένων στόχων. Κατά αυτόν τον τρόπο, η απόσταση μεταξύ του ρομπότ και το αντικείμενο στόχων μπορούν να μετρηθούν χρησιμοποιώντας τους υπέρυθρους αισθητήρες, και άλλες μέθοδοι επεξεργασίας πληροφοριών μπορούν επίσης να χρησιμοποιηθούν για να πλοηγήσουν και να εντοπίσουν το κινητό ρομπότ.
Αν και ο υπέρυθρος προσδιορισμός θέσης αντίληψης έχει επίσης τα πλεονεκτήματα όπως η υψηλή ευαισθησία, απλή δομή, και χαμηλότερο κόστος, λόγω της υψηλής ανάλυσης γωνίας τους και της χαμηλής ανάλυσης απόστασης, χρησιμοποιούνται συνήθως ως αισθητήρες εγγύτητας στα κινητά ρομπότ για να ανιχνεύσουν την προσέγγιση ή τα ξαφνικά εμπόδια μετακίνησης, που διευκολύνει την παύση έκτακτης ανάγκης των ρομπότ.
![]()
Περίπου η επιχείρηση
Η ράγα οδηγών μας έχει συνεργαστεί με πολλά διεθνή γνωστά εμπορικά σήματα ρομπότ, όπως ABB KUKA FANUC Yaskawa UR. Οι επιχειρήσεις σχετικές κυρίως περιλαμβάνουν palletizing, τη φόρτωση και την εκφόρτωση. Το φορτίο της ράγας οδηγών κυμαίνεται από 500kg ως 5000kg. Το μήκος της ράγας οδηγών προσαρμόζεται σύμφωνα με τις ανάγκες των πελατών. Έχουμε δώσει επιχειρήματα ότι ένα ρομπότ ABB IRB6700 αντιστοιχούμε σε 20 CNC μηχανές, και μια 50m μακριά ράγα οδηγών συμπληρώνει την εναλλασσόμενες κίνηση, τη φόρτωση και την εκφόρτωση του ρομπότ. Ο αριθμός ρομπότ μειώνεται πολύ και το κόστος ολοκλήρωσης κερδίζεται.
Η επιχείρησή μας προσφέρει επίσης τα βιομηχανικά ρομπότ σε πολύ ευνοϊκές τιμές για να τοποθετήσει τις διαταγές μαζί σε χαμηλότερες τιμές.
Καλωσορίστε στη Σαγκάη, Κίνα, για να ερευνήσετε τα ρομπότ και τις ράγες μας!
Ανεφοδιασμός προϊόντων επιχείρησης
Ρομπότ ABB
Ρομπότ KUKA
Ρομπότ Yaskawa
Ρομπότ Fanuc
UR ρομπότ
Cobot
Ράγα οδηγών
Cobot που κατασκευάζεται στην Κίνα
Προδιαγραφές προϊόντων
Πίνακας παραμέτρων προϊόντων


Συσκευασία και μεταφορά
![]()
![]()
Μας στείλετε την έρευνά σας άμεσα σε




