
Τόπος καταγωγής:
Κίνα
Μάρκα:
YOUNGYOU
Πιστοποίηση:
CE
Αριθμό μοντέλου:
Szgh-h1500-β-6
Επαφή ΗΠΑ




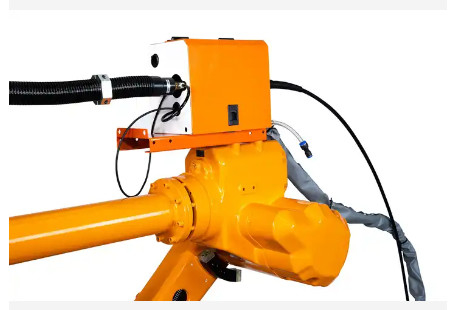
Ρομπότ βραχιόνων συγκόλλησης μηχανών αυτόματος 6 άξονα βραχίονας οξυγονοκολλητών λέιζερ βιομηχανικός ρομποτικός με Positioner
Οπτική τεχνολογία ναυσιπλοΐας και προσδιορισμού θέσης για τα κινητά ρομπότ
Στην οπτική ναυσιπλοΐα και τα τοποθετώντας συστήματα, η ο συνηθέστερα χρησιμοποιημένη μέθοδος ναυσιπλοΐας είναι στο εσωτερικό και στο εξωτερικό βασισμένη στο τοπικό όραμα, το οποίο εγκαθιστά τοποθετημένες τις αυτοκίνητο κάμερες στα ρομπότ. Σε αυτήν την μέθοδο ναυσιπλοΐας, ο εξοπλισμός ελέγχου και οι αισθαμένος συσκευές φορτώνονται στο σώμα ρομπότ, και οι υψηλού επιπέδου αποφάσεις όπως η αναγνώριση εικόνας και ο προγραμματισμός πορειών ολοκληρώνονται από τον εν πλω υπολογιστή ελέγχου.
Η οπτική ναυσιπλοΐα και το τοποθετώντας σύστημα περιλαμβάνουν κυρίως τις κάμερες (ή τους αισθητήρες εικόνας CCD), τις τηλεοπτικές συσκευές ψηφιακής αναλογικής μεταλλαγής σημάτων, τους γρήγορους επεξεργαστές σημάτων βασισμένους σε DSP, τους υπολογιστές και τις περιφερειακές μονάδες τους, κ.λπ. Πολλά συστήματα ρομπότ χρησιμοποιούν τώρα τους αισθητήρες εικόνας CCD, τα των οποίων βασικά συστατικά είναι μια σειρά των στοιχείων απεικόνισης πυριτίου. Ένα φωτοευαίσθητο στοιχείο και μια συσκευή μεταφοράς δαπανών διαμορφώνονται σε ένα υπόστρωμα, και μέσω της διαδοχικής μεταφοράς των δαπανών, τα τηλεοπτικά σήματα των πολλαπλάσιων εικονοκυττάρων λαμβάνονται έξω εγκαίρως και ακολουθία. Παραδείγματος χάριν, το ψήφισμα των εικόνων που συλλέγονται από έναν αισθητήρα σειράς CCD μπορεί να είναι από 32 × 32 έως 1024 × 1024 εικονοκύτταρα, κ.λπ.
Η αρχή εργασίας μιας οπτικής ναυσιπλοΐας και ενός τοποθετώντας συστήματος είναι απλά να εκτελεσθεί η οπτική επεξεργασία στο περιβάλλον περιβάλλον του ρομπότ. Κατ' αρχάς, μια κάμερα χρησιμοποιείται για να συλλέξει τις πληροφορίες εικόνας, να συμπιέσει τις συλλεχθείσες πληροφορίες, και να τις ταΐσει έπειτα πίσω σε ένα υποσύστημα εκμάθησης που αποτελείται από τα νευρικά δίκτυα και τις στατιστικές μεθόδους. Το υποσύστημα εκμάθησης συνδέει έπειτα τις συλλεχθείσες πληροφορίες εικόνας με την πραγματική θέση του ρομπότ, ολοκληρώνει την αυτόνομες ναυσιπλοΐα και τη λειτουργία προσδιορισμού θέσης του ρομπότ.
![]()
Περίπου η επιχείρηση
Η ράγα οδηγών μας έχει συνεργαστεί με πολλά διεθνή γνωστά εμπορικά σήματα ρομπότ, όπως ABB KUKA FANUC Yaskawa UR. Οι επιχειρήσεις σχετικές κυρίως περιλαμβάνουν palletizing, τη φόρτωση και την εκφόρτωση. Το φορτίο της ράγας οδηγών κυμαίνεται από 500kg ως 5000kg. Το μήκος της ράγας οδηγών προσαρμόζεται σύμφωνα με τις ανάγκες των πελατών. Έχουμε δώσει επιχειρήματα ότι ένα ρομπότ ABB IRB6700 αντιστοιχούμε σε 20 CNC μηχανές, και μια 50m μακριά ράγα οδηγών συμπληρώνει την εναλλασσόμενες κίνηση, τη φόρτωση και την εκφόρτωση του ρομπότ. Ο αριθμός ρομπότ μειώνεται πολύ και το κόστος ολοκλήρωσης κερδίζεται.
Η επιχείρησή μας προσφέρει επίσης τα βιομηχανικά ρομπότ σε πολύ ευνοϊκές τιμές για να τοποθετήσει τις διαταγές μαζί σε χαμηλότερες τιμές.
Καλωσορίστε στη Σαγκάη, Κίνα, για να ερευνήσετε τα ρομπότ και τις ράγες μας!
Ανεφοδιασμός προϊόντων επιχείρησης
Ρομπότ ABB
Ρομπότ KUKA
Ρομπότ Yaskawa
Ρομπότ Fanuc
UR ρομπότ
Cobot
Ράγα οδηγών
Cobot που κατασκευάζεται στην Κίνα
Προδιαγραφές προϊόντων
Πίνακας παραμέτρων προϊόντων
![]()
Συσκευασία και μεταφορά
![]()
![]()
Μας στείλετε την έρευνά σας άμεσα σε

