
Τόπος καταγωγής:
Κίνα
Μάρκα:
YOUNGYOU
Πιστοποίηση:
CE
Αριθμό μοντέλου:
GBS6-C1400
Επαφή ΗΠΑ

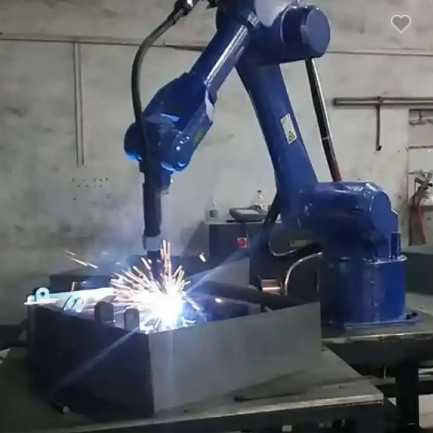



6 αυτόματο ρομπότ συγκόλλησης άξονα με CHD MIG 500 ηλεκτρικά μηχανή συγκόλλησης και Positioner συγκόλλησης
Υπερηχητική τεχνολογία ναυσιπλοΐας και προσδιορισμού θέσης για τα κινητά ρομπότ
Η αρχή εργασίας της υπερηχητικής ναυσιπλοΐας και προσδιορισμός θέσης είναι επίσης παρόμοια με αυτήν του λέιζερ και των υπέρυθρων ακτίνων. Συνήθως, τα υπερηχητικά κύματα εκπέμπονται από τον έλεγχο εκπομπής του υπερηχητικού αισθητήρα, και τα υπερηχητικά κύματα αντιμετωπίζουν τα εμπόδια στο μέσο και την επιστροφή στη λαμβάνουσα συσκευή.
Με τη λήψη του υπερηχητικού σήματος αντανάκλασης που εκπέμπεται από σε και τον υπολογισμό της απόστασης S διάδοσης βασισμένης στη χρονική διαφορά μεταξύ της υπερηχητικών εκπομπής και της υποδοχής ηχούς, καθώς επίσης και την ταχύτητα διάδοσης, η απόσταση από το εμπόδιο στο ρομπότ μπορεί να ληφθεί. Υπάρχει ένας τύπος: S=Tv/2, όπου Τ - η χρονική διαφορά μεταξύ της υπερηχητικών εκπομπής και της υποδοχής Β - η ταχύτητα των υπερηχητικών κυμάτων που διαδίδουν στο μέσο.
Φυσικά, υπάρχει επίσης πολλές κινητές τεχνολογίες ναυσιπλοΐα και προσδιορισμός θέσης ρομπότ που χρησιμοποιούν τις χωριστές διαβιβάζοντας και λαμβάνουσες συσκευές. Το πολλαπλάσιο που λαμβάνει τις συσκευές τακτοποιείται στον περιβαλλοντικό χάρτη, διαβιβάζοντας τους ελέγχους εγκαθίσταται στο κινητό ρομπότ.
Στη ναυσιπλοΐα και τον προσδιορισμό θέσης των κινητών ρομπότ, λόγω των έμφυτων ατελειών των υπερηχητικών αισθητήρων, όπως η αντανάκλαση καθρεφτών και η περιορισμένη γωνία ακτίνων, είναι δύσκολο να ληφθούν πλήρως οι περιβάλλουσες περιβαλλοντικές πληροφορίες. Επομένως, τα υπερηχητικά αισθαμένος συστήματα που αποτελούνται από τους πολλαπλάσιους αισθητήρες χρησιμοποιούνται συνήθως για να καθιερώσουν τα αντίστοιχα περιβαλλοντικά πρότυπα, και οι πληροφορίες που συλλέγονται από τους αισθητήρες διαβιβάζονται στο σύστημα ελέγχου του κινητού ρομπότ μέσω της τμηματικής επικοινωνίας, το σύστημα ελέγχου χρησιμοποιεί έπειτα ορισμένους αλγορίθμους για να επεξεργαστεί τα αντίστοιχα στοιχεία βασισμένα στα συλλεχθε'ντα σήματα και το καθιερωμένο μαθηματικό πρότυπο για να λάβουν τις πληροφορίες περιβάλλοντος θέσης του ρομπότ.
Λόγω των πλεονεκτημάτων του χαμηλότερου κόστους, του γρήγορου ποσοστού συλλογής πληροφοριών, και του υψηλού ψηφίσματος απόστασης, οι υπερηχητικοί αισθητήρες από καιρό έχουν χρησιμοποιηθεί ευρέως στη ναυσιπλοΐα και τον προσδιορισμό θέσης των κινητών ρομπότ. Επιπλέον, δεν απαιτεί τη σύνθετη τεχνολογία εξοπλισμού εικόνας κατά τη συλλογή των περιβαλλοντικών πληροφοριών, με συνέπεια τη γρήγορα κυμαινόμενη ταχύτητα και την καλή σε πραγματικό χρόνο εκτέλεση.
Συγχρόνως, οι υπερηχητικοί αισθητήρες είναι επίσης λιγότερο ευαίσθητοι στις εξωτερικές περιβαλλοντικές συνθήκες όπως οι καιρικές συνθήκες, το περιβαλλοντικό φως, οι σκιές εμποδίων, και η τραχύτητα επιφάνειας. Η ναυσιπλοΐα υπερήχου και ο προσδιορισμός θέσης έχουν χρησιμοποιηθεί ευρέως στα διάφορα συστήματα αντίληψης των κινητών ρομπότ.
![]()
Περίπου η επιχείρηση
Η ράγα οδηγών μας έχει συνεργαστεί με πολλά διεθνή γνωστά εμπορικά σήματα ρομπότ, όπως ABB KUKA FANUC Yaskawa UR. Οι επιχειρήσεις σχετικές κυρίως περιλαμβάνουν palletizing, τη φόρτωση και την εκφόρτωση. Το φορτίο της ράγας οδηγών κυμαίνεται από 500kg ως 5000kg. Το μήκος της ράγας οδηγών προσαρμόζεται σύμφωνα με τις ανάγκες των πελατών. Έχουμε δώσει επιχειρήματα ότι ένα ρομπότ ABB IRB6700 αντιστοιχούμε σε 20 CNC μηχανές, και μια 50m μακριά ράγα οδηγών συμπληρώνει την εναλλασσόμενες κίνηση, τη φόρτωση και την εκφόρτωση του ρομπότ. Ο αριθμός ρομπότ μειώνεται πολύ και το κόστος ολοκλήρωσης κερδίζεται.
Η επιχείρησή μας προσφέρει επίσης τα βιομηχανικά ρομπότ σε πολύ ευνοϊκές τιμές για να τοποθετήσει τις διαταγές μαζί σε χαμηλότερες τιμές.
Καλωσορίστε στη Σαγκάη, Κίνα, για να ερευνήσετε τα ρομπότ και τις ράγες μας!
Ανεφοδιασμός προϊόντων επιχείρησης
Ρομπότ ABB
Ρομπότ KUKA
Ρομπότ Yaskawa
Ρομπότ Fanuc
UR ρομπότ
Cobot
Ράγα οδηγών
Cobot που κατασκευάζεται στην Κίνα
Προδιαγραφές προϊόντων
Πίνακας παραμέτρων προϊόντων
![]()
![]()
![]()
![]()
Συσκευασία και μεταφορά
![]()
![]()
Μας στείλετε την έρευνά σας άμεσα σε

