

2023-07-12
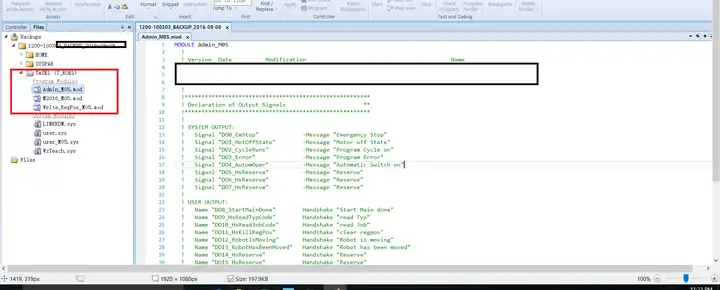 Το πρόγραμμα ρομπότ ABB μας αποτελείται κυρίως από τρεις ενότητες ενότητας:
Το πρόγραμμα ρομπότ ABB μας αποτελείται κυρίως από τρεις ενότητες ενότητας:
1. Admin
2. Ειδικό πρόγραμμα δράσης μηχανών (το καλούμε εργασία)
3. γράφουν RegPos (που χρησιμοποιείται ως δείκτης μετά από να εκτελέσει μια συγκεκριμένη θέση στην εργασία)
Στο ανωτέρω μέρος του προγράμματος, τροποποιήσαμε κυρίως την ενότητα 2module, η οποία περιλαμβάνει πολλές εργασίες, και κάθε εργασία είναι ένα ειδικό πρόγραμμα που εφαρμόζει τη μετακίνηση θέσης ρομπότ.
Οποιοδήποτε πρόγραμμα έχει ένα σημείο εισόδων προγράμματος, και κάνει έτσι τα προγράμματα ρομπότ. Και η είσοδος στο πρόγραμμα ρομπότ μας είναι στο πρόγραμμα Admin. Ο κωδικός πηγής του κεντρικού αγωγού του προγράμματος Admin () είναι ο ακόλουθος. Παρακαλώ σημειώστε ότι έχουμε δει τον κεντρικό αγωγό PROC (). Η μονάδα προγραμματισμού για τα ρομπότ ABB είναι η διαδικασία, που βραχύνεται ως PROC. Η κύρια διαδικασία για αυτό το πρόγραμμα Admin είναι βασικά μετά από να δημιουργήσει μια νέα μηχανή:
Κεντρικός αγωγός PROC ()
ΣΥΝΔΕΣΤΕ fTCPSpeedHigh ΜΕ IGenRobotMoving
ΣΥΝΔΕΣΤΕ fTCPSpeedLow ΜΕ IGenRobotMoving
ISignalAO virt_TCPSpeed_Robot1, AIO_ABOVE_HIGH, 0,02, 0, 0, fTCPSpeedHigh
ISignalAO virt_TCPSpeed_Robot1, AIO_BELOW_HIGH, 0,015, 0, 0, fTCPSpeedLow
ΕΑΝ OpMode () =OP_MAN_PROG ΈΠΕΙΤΑ
TPErase
Το TPReadFK FunkTaste, «επιλέγει τις εργασίες κίνησης από το χειρωνακτικό τρόπο; », "", "", "", «κανένας», «ναι»
ΕΑΝ FunkTaste=5 ΈΠΕΙΤΑ
Χειρωνακτικός
ΑΛΛΙΩΣ
TPErase
TPWrite «ρομπότ που κινείται στο χειρωνακτικό τρόπο»
TPWrite «επικοινωνία με το κύριος-PLC»
ENDIF
ΑΛΛΙΩΣ
TypNum: =0
JobNum: =0
Funktaste: =0
ENDIF
Μονογράψτε
SpeedLimiter
pStartingPoint: =CRobT (εργαλείο: =tool0 WObj: =wobj0)
regStartingAngleX: =EulerZYX (Χ, pStartingPoint.rot)
regStartingAngleY: =EulerZYX (Υ, pStartingPoint.rot)
regStartingAngleZ: =EulerZYX (Ζ, pStartingPoint.rot)
regStoppedAngleX: =EulerZYX (Χ, pPointAtStop.rot)
regStoppedAngleY: =EulerZYX (Υ, pPointAtStop.rot)
regStoppedAngleZ: =EulerZYX (Ζ, pPointAtStop.rot)
ΕΑΝ (pPointAtStop.trans.X>= (pStartingPoint.trans.X+regTransDiff) Ή
pPointAtStop.trans.X pPointAtStop.trans.Y>= (pStartingPoint.trans.Y+regTransDiff) Ή<>
pPointAtStop.trans.Y pPointAtStop.trans.Z>= (pStartingPoint.trans.Z+regTransDiff) Ή<>
pPointAtStop.trans.Z (regStoppedAngleX>=<>
(regStartingAngleX+regRotDiff) Ή
regStoppedAngleX<>
regStoppedAngleY>= (regStartingAngleY+regRotDiff) Ή
regStoppedAngleY<>
regStoppedAngleZ>= (regStartingAngleZ+regRotDiff) Ή
regStoppedAngleZ<>
pPointAtStop.robconfpStartingPoint.robconf ΈΠΕΙΤΑ<>
Καθορισμένο DO13_RobotHasBeenMoved
ENDIF
ΕΝΩ di8_HsStartMain=0
SetGO DO32_39_HsStepCode, 0
WaitDI DI10_ReadJobCode, 1
VelSet DI40_47_Override, 7500 ! Η ταχύτητα τίθεται ανώτατη
SetGO DO24_31_HsJobCode, DI24_31_JobCode
SetDO DO10_HsReadJobCode, 1
WaitDI DI10_ReadJobCode, 0
SetDO DO10_HsReadJobCode, 0
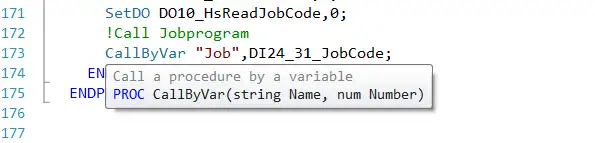
! Κλήση Jobprogram
CallByVar «εργασία», DI24_31_JobCode
ENDWHILE
ENDPROC
Αυτό το πρόγραμμα είναι λίγο μακροχρόνιο, και δεν θέλω να το εισαγάγω πάρα πολύ. Θέλω κυρίως να μιλήσω για το τελευταίο τμήμα του προγράμματος, επειδή αυτό το τμήμα είναι η εφαρμογή για το πώς το το ρομπότ καλεί το πρόγραμμα εργασίας στη δεύτερη ενότητα κατά κίνηση της θέσης του. Σκέφτομαι ότι αυτό είναι επίσης αυτό που οι περισσότεροι άνθρωποι που θέλουν να μάθουν για τα προγράμματα ρομπότ θέλουν για να ξέρουν και να καταλάβουν πιό πολύ:
Αρχικά, η πρώτη πρόταση ΕΝΩ di8_ HsStartMain=0
Σημειώστε ότι χειραψία “κεντρικός αγωγός των μέσων “DI8_HsStartMain” έναρξης που γίνεται”
Αυτό σημαίνει ότι όταν το σήμα HsStartMain Bool της ψηφιακής εισαγωγής είναι 0, σημαίνει ότι ο κεντρικός αγωγός δεν έχει αρχίσει ακόμα. Πρέπει να εκτελέσουμε ενώ κάνετε για να ολοκληρώσετε όλο τον κώδικα. Υπάρχουν κάμποσοι κώδικες εδώ, και θα δώσω ένα παράδειγμα, όπως το δεύτερο
WaitDI DI10_ ReadJobCode, 1 Η έννοια του σχολιασμού μεταβλητό «DI10_ReadJobCode» είναι η χειραψία «διαβασμένη εργασία» σημάτων χειραψιών από το PLC.
Εντάξει, έτσι πόσο ακριβώς κάνει τα ρομπότ να εκτελέσουν τις διάφορες εργασίες; Μην ανησυχήστε, το οποίο είναι αυτό:
! Η κλήση Jobprogram είναι ακριβώς ένα σχόλιο
«Εργασία» CallByVar, DI24_ 31 _JobCode Αυτή η πρόταση είναι η ουσία.
Μας στείλετε την έρευνά σας άμεσα σε

