

2023-07-12
2. Χειρισμός του ελαττώματος βραχυκυκλώματος του πίνακα βραχυκυκλώματος ενότητας δύναμης ρομπότ ABB
Ανθρώπινοι παράγοντες: Το καυτό υλικό ανταλλαγής είναι πολύ επικίνδυνο, και πολλές αποτυχίες πινάκων κυκλωμάτων προκαλούνται με την καυτή ανταλλαγή. Η ανάρμοστη χρήση δύναμης κατά την παρεμβολή των καρτών και των βουλωμάτων με τη δύναμη μπορεί να προκαλέσει τη ζημία στις διεπαφές, τα τσιπ, κ.λπ., που οδηγεί στη ζημία στον πίνακα κυκλωμάτων ρομπότ Δεδομένου ότι ο χρόνος της χρησιμοποίησης των ρομπότ αυξάνεται, τα συστατικά στον πίνακα κυκλωμάτων ρομπότ θα γεράσουν φυσικά, οδηγώντας στις αποτυχίες πινάκων κυκλωμάτων ρομπότ.
Περιβαλλοντικοί παράγοντες: Λόγω της ανάρμοστης συντήρησης από το χειριστή, ο πίνακας κυκλωμάτων ρομπότ καλύπτεται με τη σκόνη, η οποία μπορεί να προκαλέσει τα βραχυκυκλώματα σημάτων.
3. Πότε είναι απαραίτητο στα εφεδρικά βιομηχανικά ρομπότ
Μετά από την πρώτη δύναμη επάνω της νέας μηχανής.
Πρίν κάνει οποιεσδήποτε τροποποιήσεις.
3. Μετά από να ολοκληρώσει τις τροποποιήσεις.
4. Εάν τα βιομηχανικά ρομπότ είναι σημαντικά, πρέπει να γίνουν μία φορά την εβδομάδα σε τακτική βάση.
5. Είναι καλύτερο να γίνει ένα στήριγμα στο USB να οδηγήσει επίσης.
6. Τακτικά διαγράψτε τα παλαιά στηρίγματα στο ελεύθερο επάνω σκληρό διάστημα κίνησης.
4. Πώς να χειριστεί την κατάσταση όπου το ρομπότ ανοίγεται και τη διδασκαλία το κρεμαστό κόσμημα συνεχίζει την ακόλουθη διεπαφή
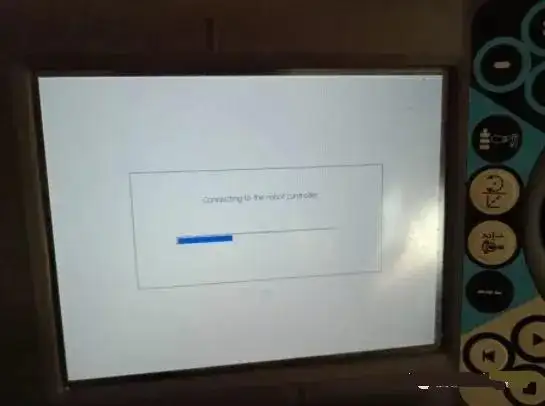 Η ανωτέρω κατάσταση είναι ότι δεν υπάρχει καμία σύνδεση επικοινωνίας που καθιερώνεται μεταξύ του κρεμαστού κοσμήματος διδασκαλίας και του κύριου ελεγκτή του ρομπότ, και οι λόγοι για τη σύνδεση περιλαμβάνουν:
Η ανωτέρω κατάσταση είναι ότι δεν υπάρχει καμία σύνδεση επικοινωνίας που καθιερώνεται μεταξύ του κρεμαστού κοσμήματος διδασκαλίας και του κύριου ελεγκτή του ρομπότ, και οι λόγοι για τη σύνδεση περιλαμβάνουν:
1. Ο οικοδεσπότης ρομπότ είναι ελαττωματικός.
2. Η ενσωματωμένη κάρτα ΘΦ (κάρτα SD) του οικοδεσπότη ρομπότ είναι ελαττωματική.
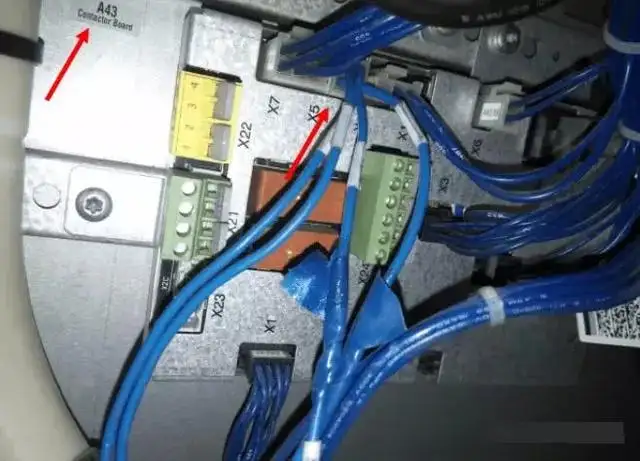
3. Το καλώδιο δικτύων μεταξύ του κρεμαστού κοσμήματος διδασκαλίας και του οικοδεσπότη είναι χαλαρό, κ.λπ.
Μέθοδος επεξεργασίας: 1. Έλεγχος εάν ο οικοδεσπότης είναι κανονικός και εάν η κάρτα SD στον οικοδεσπότη είναι κανονική.
2. Έλεγχος εάν το καλώδιο δικτύων από το κρεμαστό κόσμημα διδασκαλίας στον οικοδεσπότη συνδέεται κατάλληλα.
5. Ποια είναι η έννοια της χρονικής υπενθύμισης συντήρησης 10106 όταν επιδεικνύει το ρομπότ ένα μήνυμα συναγερμών;
Αυτή η κατάσταση είναι μια ευφυής περιοδική υπενθύμιση συντήρησης ρομπότ ABB.
6. Πώς να χειριστεί μια δυσλειτουργία συστημάτων όταν εισάγει το ρομπότ μια δύναμη στο κράτος;
1. Ξαναξεκινήστε το ρομπότ μιά φορά.
Εάν όχι, ελέγξτε το κρεμαστό κόσμημα διδασκαλίας για τις πιό λεπτομερείς υπαγορεύσεις συναγερμών και λάβετε μέτρα.
3. Καινούριο ξεκίνημα.
4. Εάν δεν μπορεί ακόμα να απελευθερωθεί, δοκιμάστε το ξεκίνημα Β.
5. Εάν ακόμα δεν λειτουργεί, παρακαλώ δοκιμάστε το ξεκίνημα Π.
6. Εάν ακόμα δεν λειτουργεί, παρακαλώ δοκιμάστε το ξεκίνημα Ι (αυτό θα επιστρέψει το ρομπότ στις τοποθετήσεις εργοστασίων του, θα είναι προσεκτικό).
7. Μπορεί το στήριγμα ρομπότ να μοιραστεί από τα πολλαπλάσια ρομπότ;
Αριθ. Παραδείγματος χάριν, το στήριγμα του ρομπότ Α μπορεί μόνο να χρησιμοποιηθεί για το ρομπότ Α, όχι για το ρομπότ Β ή Γ, δεδομένου ότι αυτό μπορεί να προκαλέσει τις διακοπές του συστήματος.
8. Ποια αρχεία μπορεί να μοιραστεί στο στήριγμα ρομπότ;
Εάν δύο ρομπότ είναι του ίδιων προτύπου και της διαμόρφωσης. Μπορείτε να μοιραστείτε το πρόγραμμα RAPID και το αρχείο EIO, αλλά μετά από να μοιραστεί, πρέπει επίσης να ελεγχθεί προτού να μπορέσει να χρησιμοποιηθεί κανονικά.
9. Ποια είναι η μηχανική προέλευση των ρομπότ; Πού είναι η μηχανική προέλευση;
Κάθε μια από τις έξι σερβο μηχανές του ρομπότ έχει μια μοναδική σταθερή μηχανική προέλευση. Ο ανακριβής καθορισμός μηχανικής προέλευσης του ρομπότ θα προκαλέσει τα προβλήματα όπως η περιορισμένη ή ανακριβής μετακίνηση του ρομπότ, της ανικανότητας να περπατήσει σε μια ευθεία γραμμή, και της σοβαρής ζημιάς στο ρομπότ.
10. Πώς να καθαρίσει το συναγερμό ελέγχου δράσης του ρομπότ 50204;
1. Τροποποιήστε τις παραμέτρους ελέγχου δράσης ρομπότ (στις επιλογές ελέγχου δράσης πινάκων ελέγχου) για να ταιριάξετε με την πραγματική κατάσταση.
2. Χρησιμοποιήστε την εντολή AccSet για να μειώσετε την επιτάχυνση του ρομπότ.
3. Μειώστε το β στην ταχύτητα data_ η επιλογή αποσυνθέσεων.
11. Πώς να χειριστεί το συναγερμό «50296, διαφορά στοιχείων μνήμης SMB» πότε το ρομπότ τροφοδοτείται για πρώτη φορά;
1. Επιλέξτε τη βαθμολόγηση από τις κύριες επιλογές ABB.
2. Χτυπήστε σε ROB_ 1. Εισάγετε την οθόνη βαθμολόγησης και επιλέξτε τη μνήμη SMB.
3. Επιλέξτε «προηγμένος», εισάγετε και χτυπήστε τη «σαφή μνήμη γραφείου ελέγχου».
4. Μετά από να ολοκληρώσει, χτυπήστε «στενό» και χτυπήστε έπειτα «την αναπροσαρμογή».
5. Επιλέξτε το “ανταλλαγμένο γραφείο ελέγχου ή το ρομποτικό βραχίονα, που επιμορφώνει το γραφείο ελέγχου με τα στοιχεία μνήμης SMB”.
12. Πώς να προσαρμόσει την ταχύτητα της κίνησης τροχιάς ρομπότ στο πρόγραμμα RAPID;
1. Επιλέξτε τα στοιχεία προγράμματος από τις κύριες επιλογές του κρεμαστού κοσμήματος διδασκαλίας.
2. Μετά από να βρεί τον τύπο Speeddata στοιχείων, χτυπήστε νέο.
3. Χτυπήστε στην αρχική αξία, και οι έννοιες των τεσσάρων μεταβλητών Speeddata είναι: v_ το TCP αντιπροσωπεύει τη γραμμική τρέχοντας ταχύτητα του ρομπότ, η αποσύνθεση v_ αντιπροσωπεύει την περιστροφική ταχύτητα του ρομπότ, v_ Leax αντιπροσωπεύει τη γραμμική λειτουργούσα ταχύτητα του εξωτερικού άξονα, v_ Reax αντιπροσωπεύει την περιστροφική ταχύτητα του εξωτερικού άξονα. Εάν δεν υπάρχει κανένας εξωτερικός άξονας, τελευταία τα δύο δεν πρέπει να τροποποιηθούν.
4. Τα προσαρμοσμένα στοιχεία μπορούν να κληθούν στο πρόγραμμα RAPID.
13. Ανίχνευση μηχανικών βλαβών 6 κοινών ελαττωμάτων στην επισκευή σερβο μηχανών ρομπότ ABB
1. Πώς να χειριστεί το αντίθετο λάθος υπερχείλισης λάθους μηχανών κατά τη διάρκεια της μεγάλης περιστροφής;
Το αντίθετο ελάττωμα υπερχείλισης λάθους μηχανών εμφανίζεται κατά τη διάρκεια της μεγάλης περιστροφής.
Αντίμετρο 1: Έλεγχος εάν η καλωδίωση του καλωδίου τροφοδοσίας μηχανών και του καλωδίου κωδικοποιητών είναι σωστή και εάν το καλώδιο είναι χαλασμένο.
Το αντίθετο ελάττωμα υπερχείλισης λάθους μηχανών εμφανίζεται κατά την εισαγωγή ενός μακροχρόνιου σφυγμού εντολής.
Το αντίθετο ελάττωμα υπερχείλισης λάθους μηχανών εμφανίστηκε κατά τη λειτουργία.
Αντίμετρο 2: Αυξήστε τη θέτοντας αξία επιπέδων υπερχείλισης του μετρητή λάθους Επιβραδύνετε την ταχύτητα περιστροφής Παρατείνετε το χρόνο επιτάχυνσης και επιβράδυνσης Το φορτίο είναι πάρα πολύ βαρύ, και είναι απαραίτητο να επιλεχτεί μια μηχανή μεγαλύτερης περιεκτικότητας εκ του μηδενός ή να μειωθεί το φορτίο, και να εγκατασταθούν οι οργανώσεις μετάδοσης όπως οι μειωτές για να αυξήσει το φορτίο.
2. Τι θα έπρεπε να γίνει εάν δεν λειτουργεί όταν υπάρχει παραγωγή σφυγμού;
Εποπτεύστε την τρέχουσα αξία της παραγωγής σφυγμού του ελεγκτή και εάν ο φακός παραγωγής σφυγμού είναι ηλεκτρικός, αναγνωρίστε ότι ο σφυγμός εντολής έχει εκπληρωθεί και τώρα κανονικά
Έλεγχος εάν το καλώδιο ελέγχου, το καλώδιο τροφοδοσίας, και το καλώδιο κωδικοποιητών από τον ελεγκτή στον οδηγό συνδέονται με καλώδιο ανακριβώς, χαλασμένος, ή σε φτωχή επαφή
Έλεγχος εάν το φρένο της σερβο μηχανής με το φρένο έχουν ανοίξει τώρα
Εποπτεύστε εάν η επιτροπή του σερβο οδηγού αναγνωρίζει την εισαγωγή των εντολών σφυγμού
Η εντολή λειτουργίας τρεξίματος είναι κανονική
Η μορφή ελέγχου πρέπει να επιλέξει την κατευθυντική μορφή ελέγχου
Ο τύπος σφυγμού εισαγωγής που τίθεται από το σερβο οδηγό σύμφωνο με τον καθορισμό του σφυγμού εντολής
Εξασφαλίστε ότι τη θετική δευτερεύουσα κίνηση περιστροφής σταματούν, το δευτερεύον σήμα στάσεων κίνησης περιστροφής, και το αντίθετο σήμα αναστοιχειοθέτησης λάθους δεν εισάγεται, το φορτίο είναι αποσυνδεμένο, και η no-load λειτουργία είναι κανονική. Ελέγξτε το μηχανικό σύστημα.
3. Τι θα έπρεπε να κάνω εάν δεν υπάρχει καμία έκθεση υπερφόρτωσης με το φορτίο;
Εάν εμφανίζεται όταν συνδέεται το σερβο σήμα τρεξίματος και κανένας σφυγμός δεν εκπέμπεται:
Ελέγξτε την καλωδίωση καλωδίου τροφοδοσίας της σερβο μηχανής που βλέπει εάν υπάρχει οποιαδήποτε φτωχή ζημία επαφών ή καλωδίων Εάν είναι μια σερβο μηχανή με ένα φρένο, το φρένο πρέπει να ανοιχτεί Είναι το κέρδος καθορισμένου πάρα πολύ του υψηλού βρόχων ταχύτητας Είναι ο ακέραιος χρόνος σταθερός καθορισμένου πάρα πολύ του μικρού βρόχων ταχύτητας.
Εάν οι σερβο μόνο δυσλειτουργίες κατά τη λειτουργία:
Είναι το κέρδος καθορισμένου πάρα πολύ του υψηλού κυκλωμάτων αζιμουθίου Είναι το εύρος καθορισμένου πάρα πολύ μικρού ολοκλήρωσης προσδιορισμού θέσης Ελέγξτε εάν δεν υπάρχει κανένας κλειδωμένος στροφέας στον άξονα σερβο μηχανών και ρυθμίστε τα μηχανήματα εκ του μηδενός.
4. Πώς να εξετάσει τους ανώμαλες ήχους ή τις δονήσεις κατά τη λειτουργία;
Σερβο καλωδίωση:
Η χρήση τυποποίησε τα καλώδια τροφοδοσίας, τα καλώδια κωδικοποιητών, τα καλώδια ελέγχου, και τα καλώδια για να ελέγξει για τη ζημία Ελέγξτε εάν υπάρχουν πηγές παρέμβασης κοντά στη γραμμή ελέγχου, και εάν είναι παράλληλες ή πάρα πολύ στενές στα κοντινά υψηλής τάσης καλώδια τροφοδοσίας Ελέγξτε εάν υπάρχει οποιαδήποτε αλλαγή στη δυνατότητα του στηρίζοντας τερματικού να εξασφαλιστεί άριστο να στηρίξει.
Σερβο παράμετροι:
Η σερβο ρύθμιση κέρδους είναι πάρα πολύ μεγάλη, και συστήνεται με το χέρι ή ενεργά ρυθμίζει τις σερβο παραμέτρους εκ του μηδενός Αναγνωρίζοντας τον καθορισμό του χρόνου σταθερού του φίλτρου απάντησης ταχύτητας, με μια αρχική αξία 0, είναι δυνατό να αυξηθεί η καθορισμένη αξία με τη δοκιμή Η ηλεκτρονική αναλογία ρύθμιση εργαλείων είναι πάρα πολύ μεγάλη, υποστηρίζοντας για να αποκαταστήσει στις τοποθετήσεις εργοστασίων Αντήχηση μεταξύ του σερβο συστήματος και του μηχανικού συστήματος, συχνότητα και εύρος φίλτρων εγκοπών δοκιμής και ρύθμισης.
Μηχανικό σύστημα:
Η σύζευξη που συνδέει τον άξονα μηχανών και το σύστημα εξοπλισμού παρέκκλινε, και οι βίδες εγκαταστάσεων δεν σφίγχτηκαν Η φτωχή δέσμευση των τροχαλιών ή των εργαλείων μπορεί επίσης να οδηγήσει στις αλλαγές στη ροπή φορτίων. No-load λειτουργία δοκιμής. Εάν η no-load λειτουργία είναι κανονική, ελέγξτε εάν υπάρχει οποιαδήποτε ανωμαλία στο συνδέοντας μέρος του μηχανικού συστήματος Αναγνωρίστε εάν η αδράνεια, η ροπή, και η ταχύτητα φορτίων είναι πάρα πολύ μεγάλες, εξετάζουν τη no-load λειτουργία, και εάν η no-load λειτουργία είναι κανονική, μειώνουν το φορτίο ή αντικαθιστούν τον οδηγό και τη μηχανή με μια μεγαλύτερη περιεκτικότητα.
5. Πώς να χειριστεί τον ανακριβή έλεγχο και τον προσδιορισμό θέσης προσανατολισμού κατά τη διάρκεια της επισκευής σερβο μηχανών ρομπότ ABB;
Αρχικά, αναγνωρίστε εάν η πραγματική δηλωμένη αξία σφυγμού του ελεγκτή είναι σύμφωνη με την αναμενόμενη αξία, και εάν όχι, έλεγχος και διορθώστε το πρόγραμμα
Εποπτεύστε εάν ο αριθμός εντολών σφυγμού που παραλαμβάνονται από το σερβο οδηγό ταιριάζει με αυτού που αναγγέλλεται από τον ελεγκτή. Εάν όχι, ελέγξτε το καλώδιο ελέγχου Ελέγξτε εάν ο καθορισμός της σερβο μορφής σφυγμού εντολής είναι σύμφωνος με τον ελεγκτή που θέτει, όπως CW/CCW ή pulse+direction
Η σερβο ρύθμιση κέρδους είναι πάρα πολύ μεγάλη, παρακαλώ με το χέρι ή ενεργά ρυθμίστε το σερβο κέρδος εκ του μηδενός Η σερβο μηχανή είναι επιρρεπή σε συσσωρευμένα λάθη κατά τη διάρκεια της εναλλασσόμενης κίνησης. Συστήνεται να τεθεί ένα μηχανικό σήμα προέλευσης υπό τους όρους που επιτρέπονται με τη διαδικασία, και να εκτελεσθεί η λειτουργία αναζήτησης προέλευσης προτού να υπερβεί το λάθος την κλίμακα Το ίδιο το μηχανικό σύστημα έχει τη χαμηλή ακρίβεια ή την ανώμαλη οργάνωση μετάδοσης (όπως η απόκλιση της σύζευξης μεταξύ της σερβο μηχανής και του συστήματος εξοπλισμού).
6. Επισκευή σερβο μηχανών ρομπότ ABB, κατευθυντική λειτουργία ελέγχου, ελάττωμα υπερβολικής επιτάχυνσης αναφερόμενο. Πώς να το χειριστεί;
Μόλις το σερβο σήμα τρεξίματος συνδέεται, θα προκαλέσει: ελέγξτε εάν η καλωδίωση του καλωδίου τροφοδοσίας σερβο μηχανών και του καλωδίου κωδικοποιητών είναι σωστή και άθικτη.
14. Πώς τα βιομηχανικά ρομπότ ABB υποβάλλονται στη στερεότυπη συντήρηση;
Πριν από την κανονική λειτουργία της «επιθεώρησης φρένων», είναι απαραίτητο να ελεγχθεί το φρένο μηχανών κάθε άξονα. Η μέθοδος επιθεώρησης για το φρένο μηχανών είναι η ακόλουθη:
1. Τρέξτε τον άξονα κάθε ρομποτικού βραχίονα στη μέγιστη θέση φορτίων του.
2. Γυρίστε την επιλογή τρόπου μηχανών ανάβει τον ελεγκτή ρομπότ στις ΜΗΧΑΝΕΣ ΑΠΟ τη θέση.
3. Έλεγχος εάν ο άξονας είναι στην αρχική θέση του. Εάν ο μηχανικός βραχίονας διατηρεί ακόμα τη θέση του αφότου κλείνεται η μηχανή, δείχνει ότι το φρένο είναι σε καλή κατάσταση.
Κίνδυνος τη λειτουργία λειτουργίας επιβράδυνσης (250mm/s)
Μην αλλάξτε την αναλογία εργαλείων ή άλλες παραμέτρους κινήσεων από τον υπολογιστή ή το κρεμαστό κόσμημα διδασκαλίας. Αυτό έχει επιπτώσεις στη λειτουργία λειτουργίας επιβράδυνσης (250mm/s).
15. Διάφορα σημεία για να δώσει προσοχή κατά να χρησιμοποιήσει τις ενισχύσεις διδασκαλίας ακίνδυνα:
Το κουμπί συσκευών διευκόλυνσης που εγκαθίσταται στο κρεμαστό κόσμημα διδασκαλίας, όταν πιέζεται στα μισά του δρόμου, αλλάζει το σύστημα στις ΜΗΧΑΝΕΣ στον τρόπο. Όταν το κουμπί απελευθερώνεται ή πιέζεται πλήρως, το σύστημα αλλάζει στις ΜΗΧΑΝΕΣ ΑΠΟ τον τρόπο.
16. Προκειμένου να χρησιμοποιηθεί οι ενισχύσεις διδασκαλίας ακίνδυνα, οι ακόλουθες αρχές πρέπει να ακολουθηθούν:
1.When που το κουμπί συσκευών διευκόλυνσης δεν μπορεί να χάσει τη λειτουργία του κατά τη διάρκεια του προγραμματισμού ή της διόρθωσης, και το ρομπότ δεν πρέπει να κινηθεί, αμέσως απελευθέρωση το κουμπί συσκευών διευκόλυνσης.
2. Όταν το προγραμματίζοντας προσωπικό εισάγει μια ασφαλή περιοχή, πρέπει πάντα να φέρουν το κρεμαστό κόσμημα διδασκαλίας στο σώμα τους για να αποτρέψουν άλλους από την κίνηση του ρομπότ.
17. Κατά λειτουργία μέσα στη λειτουργώντας σειρά του ρομποτικού βραχίονα, ακόλουθα τη σημεία πρέπει να παρατηρηθούν:
1. Την επιλογή τρόπου ανάβει τον ελεγκτή πρέπει να γυρίσουν στη χειρωνακτική θέση προκειμένου να ενεργοποιηθεί η συσκευή διευκόλυνσης για να αποσυνδέσει τον υπολογιστή ή να λειτουργήσει μακρινά
2. Όταν ο διακόπτης επιλογής τρόπου είναι ανοικτός
3. Δώστε προσοχή στον άξονα περιστροφής του ρομποτικού βραχίονα, να είστε προσεκτικός όταν η τρίχα ή ο ιματισμός παίρνει μικτή επάνω. Επίσης, δώστε προσοχή σε άλλο επιλεγμένο συστατικά ή εξοπλισμό στο ρομποτικό βραχίονα
4. Ελέγξτε το φρένο μηχανών κάθε άξονα.
18. Απόκλιση αφής
Φαινόμενο 1: Η θέση που αγγίζεται από τα δάχτυλα δεν συμπίπτει με το βέλος ποντικιών.
Λόγος: Μετά από να εγκαταστήσει το πρόγραμμα οδηγών, το κρεμαστό κόσμημα διδασκαλίας δεν άγγιξε κάθετα το κέντρο της θέσης bullseye κατά τη διάρκεια της βαθμολόγησης.
Λύση: Επαναρυθμίστε τη θέση.
Φαινόμενο 2: Μερικές περιοχές έχουν την ακριβή αφή, ενώ άλλες έχουν την απόκλιση στην αφή.
Αιτία: Μια σκόνη ή μια κλίμακα μεγάλου ποσού συσσωρεύει στα ακουστικά λωρίδες αντανάκλασης γύρω από την οθόνη αφής ακουστικών κυμάτων επιφάνειας, η οποία έχει επιπτώσεις στη μετάδοση των ακουστικών σημάτων.
Λύση: Καθαρίστε την οθόνη αφής, πληρώνοντας τη ειδική προσοχή στον καθαρισμό των λωρίδων αντανάκλασης υγιών κυμάτων σε όλες τις πλευρές της οθόνης αφής. Κατά την καθαρισμό, αποσυνδέστε την παροχή ηλεκτρικού ρεύματος της κάρτας ελέγχου οθόνης αφής.
19. Το κρεμαστό κόσμημα διδασκαλίας δεν αγγίζει καμία απάντηση
Φαινόμενο: Όταν σχετικά με την οθόνη, τα βέλη ποντικιών δεν κινούνται και δεν υπάρχει καμία αλλαγή σε θέση.
Λόγος: Υπάρχουν πολλοί λόγοι για αυτό το φαινόμενο, ως εξής:
1. Η σκόνη ή η κλίμακα που συσσωρεύεται στα ακουστικά λωρίδες αντανάκλασης γύρω από την οθόνη αφής ακουστικών κυμάτων επιφάνειας είναι πολύ σοβαρή, αναγκάζοντας την οθόνη αφής για να αποτύχει να εργαστεί
2. Δυσλειτουργία οθόνης αφής
3. Η κάρτα ελέγχου οθόνης αφής έχει δυσλειτουργήσει
4. Η γραμμή σημάτων οθόνης αφής έχει δυσλειτουργήσει
5. Ο τμηματικός λιμένας των δυσλειτουργιών οικοδεσποτών
6. Το λειτουργικό σύστημα του κρεμαστού κοσμήματος διδασκαλίας έχει δυσλειτουργήσει
7. Λάθος εγκαταστάσεων οδηγών οθόνης αφής.
Λύση: Παρατηρήστε το φως δεικτών σημάτων οθόνης αφής, ποιες λάμψεις τακτικά υπό κανονικές συνθήκες, περίπου μιά φορά ανά δευτερόλεπτο.
Όταν σχετικά με την οθόνη, το κρεμαστό κόσμημα διδασκαλίας πηγαίνει μαύρο, το οποίο είναι ένα σύνθετο πρόβλημα. Εάν backlight η εξοικονόμηση ενέργειας τίθεται, η μαύρη οθόνη είναι κανονική Εάν η δεύτερη λέξη στην περιοχή ελέγχου συστημάτων χρησιμοποιείται τυχαία, η οθόνη θα πάει επίσης μαύρη. Εάν τα πρώτα δύο σημεία αποκλείονται, ενημερώστε στο πιό πρόσφατο υλικολογισμικό για την αναθεώρηση.
Μας στείλετε την έρευνά σας άμεσα σε

